本站10月25日消息,昨日下午,小鵬汽車舉辦了“小鵬P7 AI智駕技術分享會暨首發AI天璣5.4.0先享會”,小鵬汽車副總裁、自動駕駛負責人李力耘登臺發表演講。

他表示,中國智能駕駛輿論亂象叢生,各說各話,“智能駕駛不是廣告學,不是喊幾句漂亮的口號或畫幾張好看的PPT立馬就能實現的。智能駕駛需要非常扎實工程量產經驗,也需要一步步的積累。技術、團隊、體系,每個環節都不是一蹴而就,能一步達成的。”


李力耘人認為,智駕技術發展進入端到端時代,相當于冷兵器時代進入到熱兵器時代,目前端到端路線有三種:
一種是通過大量規則小模型堆疊的“大模型”,其需要大量的優秀規則工程師;
一種是“車端大模型”,即直接將端到端模型部署于車輛上,雖然見效快,但受限于車端算力,且隨著后期訓練數據量的增加,容易陷入瓶頸;
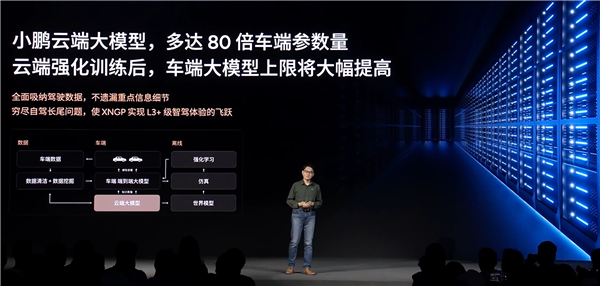
最后一種便是云端大模型,其參數量是車端模型的幾十倍甚至數百倍,這是單純的車端大模型所不可企及的,而小鵬汽車采用的正是這一種。

李力耘表示,智能駕駛領域不存在彎道超車,盡管選擇前兩種端到端的技術路線都能帶來一定成效,但從智駕競爭的終局來看,布局云端大模型才是制勝關鍵。
他還稱,小鵬云端大模型的參數量將多達車端參數量80倍,通過大參數量的訓練,能夠盡可能地窮盡智能駕駛中的長尾問題,以覆蓋更多駕駛場景,使XNGP實現L3級的智駕體驗。
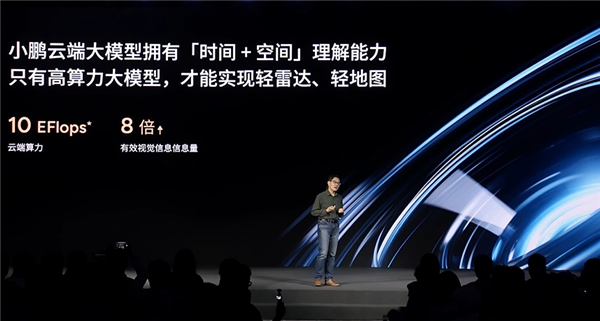
據悉,目前,小鵬云端大模型的訓練效率已提升了2.6倍,2025年云端算力將會達到10EFlops以上。
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



