本站10月29日消息,理想汽車行業的“端到端 VLM”智能駕駛,已向全量車主開啟推送,全新一代智駕具備更安全、輕松的特性,駕駛風格更像老司機。
日前,理想汽車發布了理想智能駕駛產品經理科普理想端到端 VLM智駕的科普視頻。
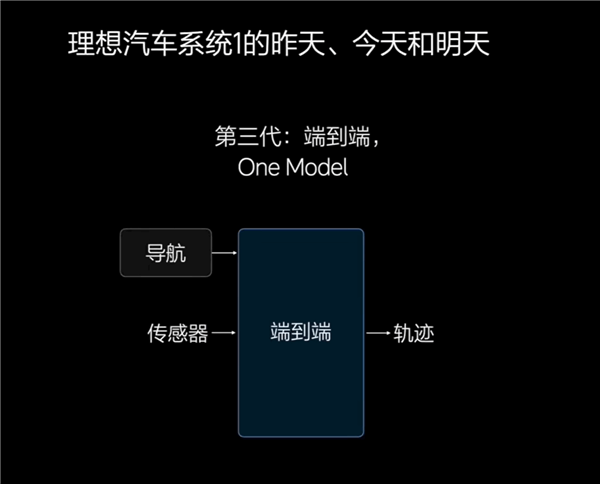
據其介紹,端到端是指一端是傳感器,另一端是行駛路線,之前的智駕算法多半是規則式的。
首先由感知系統去識別路況,規劃系統根據感知信息去計算出一條行駛路線,最后由控制系統去執行這條路線,決策什么時候加減速和轉向。
每個系統都相對獨立,需要按序就班工作,由于每一個步驟都需要計算時間,因此系統的整體響應會偏慢。
比如前方有一輛車輛切入我們的車道,當執行完這一系列步驟之后,可能會錯過最佳制動點,剎車不穩引起體感不適,或者在前車駛離之后,無需剎車時還在剎車。
而端到端是把這一系列步驟全部交給一個大腦來執行,由它來接收所有傳感器數據,然后直接輸出行駛路徑,無需拆解成多個步驟,這就是端到端。
同時,傳統規則的算法對于每一個場景的應對,都需要工程師提前寫入規則才能處理。而現實世界的情況是無窮無盡的,總會有一些超出我們意料之外的情況。這時候就可能會導致車輛無法計算出路線而停在原地。
而端到端能夠通過充分學習人類的駕駛數據之后,能夠計算出對應的駕駛策略。
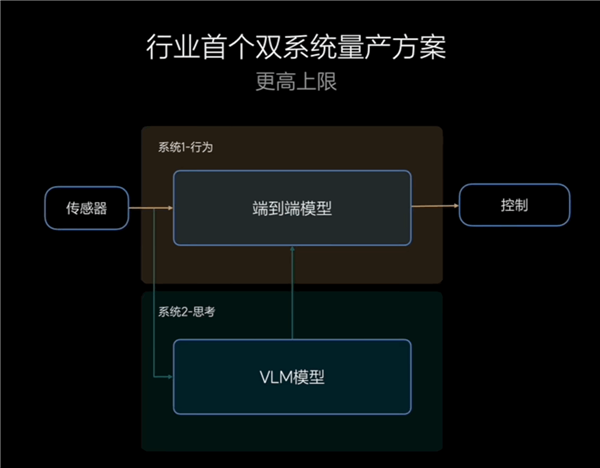
至于VLM視覺大模型,相當于人類應對復雜場景的思考和推理能力,端到端可以快速搞定大部分基礎日常出行場景,但還有一部分場景需要推理思考才行。
比如遇見公交車道時,首先要去思考為什么車道線的顏色不一樣,然后去識別文字信息,判斷自己是不是屬于限行車輛,最后去對比一下限行時間,決策是不是立刻要駛離公交車道,這就是VLM的作用,去理解這個更復雜的世界,做出正確的決策。
例如,VLM視覺大模型可以幫助智駕能夠更精準的識別應對坑洼、減速帶、施工、丁字路口、夜晚無燈、主輔路進出等場景,做到提前減速,安全通行。
總的來說,VLM相當于端到端的副駕做了一個教練,當端到端走錯路或需要幫助時,VLM可以主動提供建議,幫助端到端開的更好。
相較于無圖NOA智駕,端到端 VLM智駕,智駕軌跡更擬人,通行更高效,駕駛更安全。

鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



