本站9月2日消息,哈爾濱工程大學船舶工程學院李國瑞教授團隊研發的電液驅動深海軟體機器人,近日成功完成4070米深海試驗。
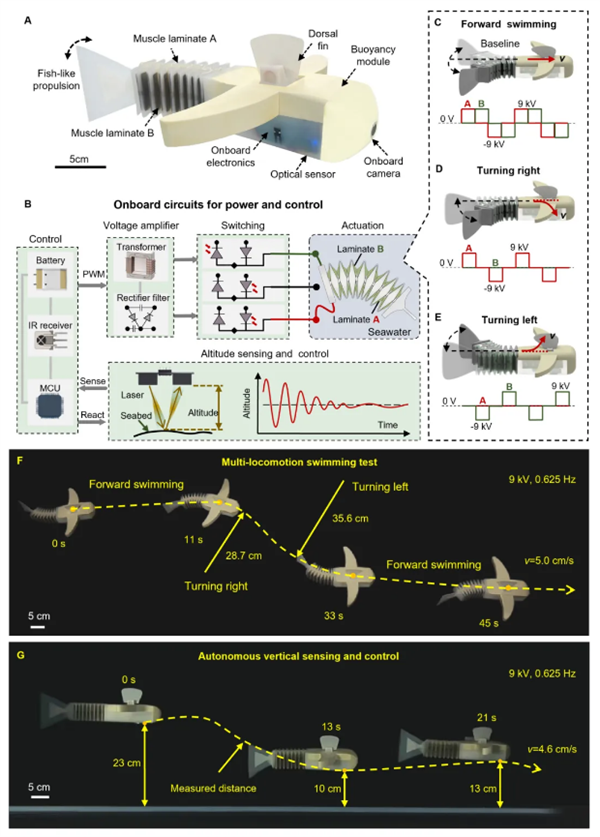
該機器人機身集成了控制電路、傳感器與電池等組件。課題組針對軟體驅動器、光學傳感器、電子元件及軟基體等關鍵部分進行了力學優化,顯著提升了機器人在高壓深海環境下的應力穩定性。

其創新之處在于,柔性電液單元內部的介電液體能夠與深海海水壓力實現自動平衡,使機器人無需額外耐壓外殼即可適應全海深范圍的極端壓力環境。
機器人通過自帶的小型化能源系統驅動多個柔性電液單元協同工作。當軟基體中的電子器件產生高壓電信號時,電液單元在電壓作用下形成類似“流體靜力骨骼”的變形機制,從而推動機器人在深海中實現直行、轉彎等多種運動。
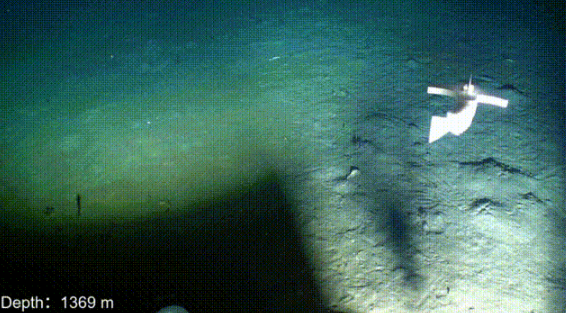
此外,該機器人還搭載了微型深海光學感知系統,可在極端環境下實時監測自身運動狀態與周圍環境。
目前,團隊正進一步開展小型化深海軟體機器人在驅動、感知、通信一體化集成及群體智能等方面的研究。
李國瑞表示,未來團隊將持續攻關極端環境下柔性裝備在材料耐久性、系統可靠性與智能化水平等方面的關鍵技術,拓展深海柔性探測裝備的應用前景。例如,可利用群體軟體機器人低擾動融入深海生物群落或礦區實施原位探測,或借助軟體機器手實現脆弱樣本的無損采集與精細操作。
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



